Argumenty wiersza poleceń
SIMRIG Control Center używa argumentów wiersza poleceń do rozszerzania swojego działania oraz procedury uruchamiania. Jest to funkcja zaawansowana, przydatna tylko dla nielicznych.
Rozpoznawane są następujące argumenty wiersza poleceń:
Argument |
Opis |
|---|---|
/Version |
Wyświetla wersję programu, a następnie kończy działanie |
/SingleCore |
Ogranicza program do używania jednego rdzenia procesora |
/ReloadDrivers |
Wymusza jednokrotne przeładowanie wszystkich sterowników urządzeń podczas uruchamiania |
/ReloadDriver |
Zobacz /ReloadDrivers |
/ForceEnable |
Automatycznie włącza ruch przy starcie |
/TelemetrySource |
Wyświetla wszystkie dostępne identyfikatory źródeł telemetrii |
/TelemetrySource=<id> |
Zastępuje automatyczny wybór źródła telemetrii podanym identyfikatorem źródła telemetrii |
/Minimized |
Uruchamia z głównym oknem zminimalizowanym |
/Simple |
Wyświetla uproszczony interfejs z mniejszą liczbą ustawień i większą automatyzacją |
/EnableRemoteControl |
Nasłuchuje i wykonuje polecenia zdalnego sterowania |
Następujące argumenty wiersza poleceń są używane do celów wewnętrznych. Nie należy na nich polegać:
Argument |
Opis |
|---|---|
/AutoStart |
Wskazuje, że program został uruchomiony przez system Windows podczas startu systemu. Bieżący katalog jest ustawiany tak, aby obejmował plik wykonywalny SIMRIG Control Center. |
/Restart |
Wskazuje, że program został uruchomiony ponownie przez samego siebie. Przed kontynuowaniem czeka na zakończenie poprzedniej instancji. |
/Updated |
Wskazuje, że program został zaktualizowany |
Polecenia zdalnego sterowania
Polecenia zdalnego sterowania służą do automatyzacji SIMRIG Control Center. Umożliwiają zewnętrznym programom i skryptom ograniczoną kontrolę nad systemem. Realizuje się to poprzez uruchamianie SimrigRemoteControl.exe z określonymi argumentami wiersza poleceń oraz interpretowanie zwracanych kodów zakończenia i danych JSON.
Informacja
SimrigRemoteControl.exe jest częścią opcjonalnego pakietu Management Tools. Zainstaluj ten pakiet za pomocą instalatora SIMRIG Control Center.
Procedura wygląda następująco:
Uruchom długotrwałą instancję SIMRIG Control Center z użyciem argumentu wiersza poleceń /EnableRemoteControl. Ta instancja steruje systemem ruchu, odczytuje telemetrię z gry i wchodzi w interakcję z użytkownikiem. Nazywa się ją serwerem [1]. Następnie, aby włączyć ruch, uruchom SimrigRemoteControl.exe EnableMotion. Ta krótkotrwała instancja SimrigRemoteControl.exe nazywa się klientem [2]. Klient wysyła do serwera polecenie EnableMotion. Serwer wówczas włącza ruch i odpowiada powodzeniem albo niepowodzeniem. Proces klienta następnie kończy działanie i zgłasza wynik za pomocą kodu zakończenia oraz JSON na standardowym wyjściu.
Inaczej mówiąc, użytkownik uruchamia SIMRIG Control Center z włączonym zdalnym sterowaniem. Skrypt następnie uruchamia SimrigRemoteControl.exe raz po raz za każdym razem, gdy chce wydać polecenie.
Zwracane są następujące kody zakończenia:
Kod zakończenia |
Opis |
|---|---|
0 |
Powodzenie |
1 |
Ogólny błąd serwera. Szczegóły na standardowym wyjściu. |
2 |
Ogólny błąd klienta. Szczegóły na standardowym wyjściu. |
3 |
Nieznane polecenie. Klient nie rozpoznaje podanego polecenia. |
4 |
Błędne lub brakujące argumenty. Polecenie oczekuje większej ilości informacji lub innych informacji z argumentów wiersza poleceń. |
5 |
Limit czasu. Żaden serwer nie jest uruchomiony. |
Dostępne są następujące polecenia:
Polecenie |
Opis |
|---|---|
EnableMotion |
Włącza system ruchu. Ruch uruchamia się, gdy telemetria stanie się dostępna. |
DisableMotion |
Wyłącza system ruchu. System ruchu wraca do położenia neutralnego, po czym zasilanie silników zostaje wyłączone. |
ResetAllDevices |
Resetuje wszystkie podłączone urządzenia |
SystemStatus |
Zwraca stan systemu i urządzeń |
Szczegółowe wyniki są zwracane jako obiekty JSON na standardowym wyjściu.
Komunikaty błędów mają następujący format:
{
"type": "error",
"error": "Tu znajduje się opis błędu.",
"other_fields": "mogą również istnieć"
}
Komunikaty powodzenia mają następujący format:
{
"type": "success",
"other_fields": "mogą również istnieć"
}
EnableMotion
Włącza system ruchu. Daje to taki sam efekt jak naciśnięcie przycisku Enable w głównym interfejsie. Ruch rozpoczyna się, gdy telemetria jest dostępna. Gdy telemetria ustaje, system wraca do pozycji spoczynkowej, po czym zasilanie zostaje wyłączone.
- output:
Przy powodzeniu zwracany jest pusty komunikat sukcesu:
{"type": "success"}.
DisableMotion
Wyłącza system ruchu. Daje to taki sam efekt jak naciśnięcie przycisku Disable w głównym interfejsie. System wraca do pozycji spoczynkowej, po czym zasilanie zostaje wyłączone.
- output:
Przy powodzeniu zwracany jest pusty komunikat sukcesu:
{"type": "success"}.
ResetAllDevices
Ostrzeżenie
Kody błędów są ustawiane wyłącznie wtedy, gdy wystąpi problem sprzętowy. Nie należy ich lekceważyć. Zawsze zbadaj przyczynę kodu błędu przed resetem. Nieprzestrzeganie tego może skutkować trwałym uszkodzeniem.
Resetuje wszystkie podłączone urządzenia. Czyści to wszystkie kody błędów.
- output:
Przy powodzeniu zwracany jest pusty komunikat sukcesu:
{"type": "success"}.
SystemStatus
Pobiera stan systemu; na przykład informację, czy ruch jest włączony. Obejmuje to informacje o wszystkich podłączonych urządzeniach.
- output:
Przy powodzeniu zwracany jest stan systemu:
{ "system_status": { "devices": [ { "nominal": false, "error_codes": [18, 18, 18, 18], "estopped": false, "firmware_update_available": false, "device_status": "" } ], "motion_enabled": false, "telemetry_source": 0, "telemetry_status": "" }, "type": "success" }
- system_status
- devices
To jest tablica wszystkich urządzeń podłączonych do systemu. Może mieć wartość
null, jeśli nie znaleziono żadnych urządzeń.- nominal
Flaga ma wartość
true, jeśli stan urządzenia jest nominalny. Jeśli flaga ma wartośćfalse, może to oznaczać, że urządzenie jest odłączone lub że ustawiono kod błędu.
- error_codes
O ile nie jest to
null, ta tablica zawiera wszystkie kody błędów ustawione przez urządzenie. Zresetuj urządzenie, aby wyczyścić kody błędów. Zobacz warning.
- estopped
Flaga pomocnicza, która ma wartość
true, gdy aktywny jest wyłącznik awaryjny. Jest to interpretacja tablicy kodów błędów.
- firmware_update_available
Flaga ma wartość
true, jeśli dla tego urządzenia jest dostępna aktualizacja firmware.
- device_status
Czytelny dla człowieka opis stanu urządzenia. Może wskazywać, że urządzenie działa, a wszystko działa zgodnie z oczekiwaniami. Może też wskazywać, że wystąpił błąd sprzętowy itp.
- motion_enabled
Flaga ma wartość
true, gdy ruch jest włączony. Użyj poleceńEnableMotion/DisableMotion, aby kontrolować tę flagę.
- telemetry_source
Identyfikator bieżącego źródła telemetrii.
- telemetry_status
Czytelny dla człowieka opis bieżącego stanu źródła telemetrii. Może wskazywać, że gra jest uruchomiona i wszystko działa zgodnie z oczekiwaniami. Może też wskazywać, że żadna gra nie jest uruchomiona itp.
Dziennik zmian
- 2023-08-28:
Używaj
SimrigRemoteControl.exedo wydawania poleceń zamiastSimrigControlCenter.exe
- 2023-08-01:
Zmieniono nazwę
okurządzeń nanominalDodano
device_status
Konfiguracja skrótu
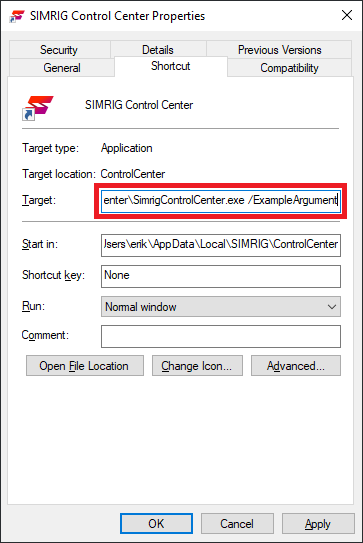
Aby uruchamiać SIMRIG Control Center z jednym lub większą liczbą argumentów wiersza poleceń, utwórz nowy skrót na pulpicie lub w menu Start. Użyj łatwej do zapamiętania nazwy. Następnie kliknij skrót prawym przyciskiem myszy, aby otworzyć Właściwości.
Dodaj argumenty wiersza poleceń na końcu pola tekstowego Element docelowy. Zapisz zmiany.
SIMRIG Control Center uruchamia się z dodanymi argumentami wiersza poleceń za każdym razem, gdy w przyszłości użyjesz tego skrótu.