Arguments en ligne de commande
SIMRIG Control Center utilise des arguments en ligne de commande pour augmenter son comportement et sa procédure de démarrage. Ils sont une fonctionnalité avancée utile uniquement pour quelques utilisateurs sélectionnés.
Les arguments en ligne de commande suivants sont reconnus :
Argument |
Description |
|---|---|
/Version |
Affiche la version du programme puis se termine |
/SingleCore |
Limite le programme à l’utilisation d’un seul cœur de processeur |
/ReloadDrivers |
Recharge tous les pilotes de périphériques une fois au démarrage |
/ReloadDriver |
Voir /ReloadDrivers |
/ForceEnable |
Active automatiquement le mouvement au démarrage |
/TelemetrySource |
Liste tous les identifiants de source de télémétrie disponibles |
/TelemetrySource=<id> |
Remplace la sélection automatique de la source de télémétrie par l’identifiant de source de télémétrie fourni |
/Minimized |
Démarre avec la fenêtre principale réduite |
/Simple |
Affiche une interface utilisateur simplifiée avec moins de paramètres et plus d’automatisation |
/EnableRemoteControl |
Écoute et obéit aux commandes de contrôle à distance |
Les arguments en ligne de commande suivants sont utilisés à des fins internes. Ne vous fiez pas à ceux-ci :
Argument |
Description |
|---|---|
/AutoStart |
Indique que le programme a été démarré par Windows au démarrage du système. Le répertoire actuel est configuré pour inclure l’exécutable SIMRIG Control Center. |
/Restart |
Indique que le programme a été redémarré par lui-même. Attend que l’instance précédente se termine avant de continuer. |
/Updated |
Indique que le programme a été mis à jour |
Commandes de contrôle à distance
Les commandes de contrôle à distance sont utilisées pour automatiser le SIMRIG Control Center. Elles permettent à des programmes et scripts externes de contrôler le système de manière limitée. Ce contrôle s’exerce en exécutant SimrigRemoteControl.exe avec des arguments en ligne de commande spécifiques, et en interprétant les codes de sortie et le JSON renvoyés.
Note
SimrigRemoteControl.exe fait partie du package optionnel Management Tools. Installez ce package en utilisant l’installateur du SIMRIG Control Center.
La procédure est la suivante :
Démarrez une instance de longue durée du SIMRIG Control Center en utilisant l’argument en ligne de commande /EnableRemoteControl. Cette instance contrôle le système de mouvement, lit la télémétrie du jeu et interagit avec l’utilisateur. Elle est connue sous le nom de serveur [1]. Ensuite, pour activer le mouvement, exécutez SimrigRemoteControl.exe EnableMotion. Cette instance de courte durée de SimrigRemoteControl.exe est connue sous le nom de client [2]. Le client envoie une commande EnableMotion au serveur. Le serveur active alors le mouvement et répond par un succès ou un échec. Le processus client se termine ensuite et signale le résultat à l’aide d’un code de sortie et d’un JSON sur la sortie standard.
En d’autres termes, l’utilisateur démarrerait SIMRIG Control Center avec le contrôle à distance activé. Le script démarre ensuite SimrigRemoteControl.exe encore et encore chaque fois qu’il souhaite émettre une commande.
Les codes de sortie suivants sont renvoyés :
Code de sortie |
Description |
|---|---|
0 |
Succès |
1 |
Erreur générique du serveur. Voir la sortie standard pour les détails. |
2 |
Erreur générique du client. Voir la sortie standard pour les détails. |
3 |
Commande inconnue. Le client ne reconnaît pas la commande donnée. |
4 |
Arguments malformés ou manquants. La commande attend plus d’informations ou d’autres informations des arguments en ligne de commande. |
5 |
Délai d’attente. Aucun serveur n’est en cours d’exécution. |
Les commandes suivantes sont disponibles :
Commande |
Description |
|---|---|
EnableMotion |
Active le système de mouvement. Le mouvement commence lorsque la télémétrie devient disponible. |
DisableMotion |
Désactive le système de mouvement. Le système de mouvement revient à sa position neutre puis l’alimentation des moteurs est désactivée. |
ResetAllDevices |
Réinitialise tous les appareils connectés |
SystemStatus |
Renvoie l’état du système et des appareils |
Les résultats détaillés sont renvoyés sous forme d’objets JSON sur la sortie standard.
Les messages d’erreur ont le format suivant :
{
"type": "error",
"error": "Une description de l'erreur va ici.",
"other_fields": "peut également exister"
}
Les messages de succès ont le format suivant :
{
"type": "success",
"other_fields": "peut également exister"
}
EnableMotion
Active le système de mouvement. Cela a le même effet que d’appuyer sur le bouton Activer dans l’interface utilisateur principale. Le mouvement commence lorsque la télémétrie est disponible. Le système est renvoyé à sa position de repos lorsque la télémétrie s’arrête puis l’alimentation est coupée.
- output:
Un message de succès vide est renvoyé en cas de succès :
{"type": "success"}.
DisableMotion
Désactive le système de mouvement. Cela a le même effet que d’appuyer sur le bouton Désactiver dans l’interface utilisateur principale. Le système est renvoyé à sa position de repos puis l’alimentation est coupée.
- output:
Un message de succès vide est renvoyé en cas de succès :
{"type": "success"}.
ResetAllDevices
Avertissement
Les codes d’erreur ne sont définis que lorsqu’un problème matériel survient. Ils ne doivent pas être pris à la légère. Toujours enquêter sur la cause du code d’erreur avant de réinitialiser. Le non-respect de cette consigne peut entraîner des dommages permanents.
Réinitialise tous les appareils connectés. Cela efface tous les codes d’erreur.
- output:
Un message de succès vide est renvoyé en cas de succès :
{"type": "success"}.
SystemStatus
Obtenez l’état du système ; tel que si le mouvement est activé ou non. Cela inclut des informations sur tous les appareils connectés.
- output:
L’état du système est renvoyé en cas de succès :
{ "system_status": { "devices": [ { "nominal": false, "error_codes": [18, 18, 18, 18], "estopped": false, "firmware_update_available": false, "device_status": "" } ], "motion_enabled": false, "telemetry_source": 0, "telemetry_status": "" }, "type": "success" }
- system_status
- devices
Ceci est un tableau de tous les appareils connectés au système. Il peut être
nullsi aucun appareil n’est trouvé.- nominal
Ce drapeau est
truesi l’état de l’appareil est nominal. Si le drapeau estfalse, cela peut indiquer que l’appareil est déconnecté, ou qu’un code d’erreur est défini.
- error_codes
Sauf si
null, ce tableau contient tous les codes d’erreur définis par l’appareil. Réinitialisez l’appareil pour effacer les codes d’erreur. Voir l’avertissement.
- estopped
Un drapeau pratique qui est
truelorsque l’arrêt d’urgence est actif. C’est une interprétation du tableau des codes d’erreur.
- firmware_update_available
Ce drapeau est
truesi une mise à jour du firmware est disponible pour cet appareil.
- device_status
Une explication lisible par un humain de l’état de l’appareil. Cela peut indiquer que l’appareil fonctionne et que tout se passe comme prévu. Cela peut également indiquer qu’une erreur matérielle s’est produite, etc.
- motion_enabled
Ce drapeau est
truelorsque le mouvement est activé. Utilisez les commandesEnableMotion/DisableMotionpour contrôler ce drapeau.
- telemetry_source
L’identifiant de la source de télémétrie actuelle.
- telemetry_status
Une explication lisible par un humain de l’état actuel de la source de télémétrie. Cela peut indiquer que le jeu est en cours d’exécution et que tout se passe comme prévu. Cela peut également indiquer qu’aucun jeu n’est en cours d’exécution, etc.
Journal des modifications
- 2023-08-28:
Utilisez
SimrigRemoteControl.exepour envoyer des commandes au lieu deSimrigControlCenter.exe
- 2023-08-01:
Renommé le champ
okdes appareils ennominalAjoute
device_status
Configuration du raccourci
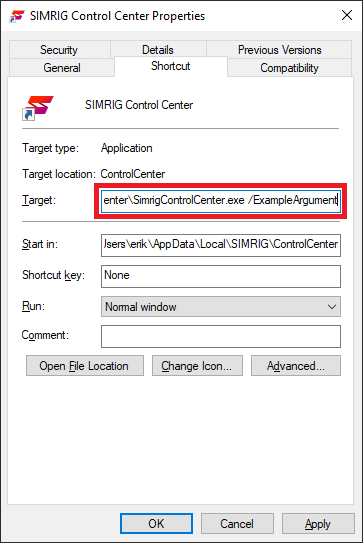
Pour démarrer SIMRIG Control Center avec un ou plusieurs arguments en ligne de commande, créez un nouveau raccourci sur votre bureau ou dans le menu démarrer. Utilisez un nom mémorable. Ensuite, cliquez avec le bouton droit de la souris sur le raccourci pour ouvrir ses Propriétés.
Ajoutez vos arguments en ligne de commande à la fin de la zone de texte Cible. Enregistrez les modifications.
SIMRIG Control Center commence avec les arguments en ligne de commande ajoutés chaque fois que ce raccourci est utilisé à l’avenir.