Argumentos de línea de comandos
SIMRIG Control Center utiliza argumentos de línea de comandos para aumentar su comportamiento y procedimiento de inicio. Son una característica avanzada útil solo para unos pocos seleccionados.
Los siguientes argumentos de línea de comandos son reconocidos:
Argumento |
Descripción |
|---|---|
/Version |
Imprime la versión del programa y luego termina |
/SingleCore |
Limita el programa para usar un solo núcleo del procesador |
/ReloadDrivers |
Reforza la recarga de todos los controladores de dispositivos una vez al inicio |
/ReloadDriver |
Vea /ReloadDrivers |
/ForceEnable |
Habilita automáticamente el movimiento al inicio |
/TelemetrySource |
Enumera todas las ID de fuentes de telemetría disponibles |
/TelemetrySource=<id> |
Sobrescribe la selección automática de la fuente de telemetría con la ID de fuente de telemetría dada |
/Minimized |
Inicia con la ventana principal minimizada |
/Simple |
Muestra una interfaz simplificada con menos configuraciones y más automatización |
/EnableRemoteControl |
Escucha y obedece comandos de control remoto |
Los siguientes argumentos de línea de comandos se usan para propósitos internos. No confíe en ellos:
Argumento |
Descripción |
|---|---|
/AutoStart |
Indica que el programa fue iniciado por Windows al inicio del sistema. El directorio actual está configurado para incluir el ejecutable de SIMRIG Control Center. |
/Restart |
Indica que el programa fue reiniciado por sí mismo. Espera a que la instancia anterior salga antes de continuar. |
/Updated |
Indica que el programa fue actualizado |
Comandos de control remoto
Los comandos de control remoto se utilizan para automatizar SIMRIG Control Center. Permiten que programas y scripts externos tengan un control limitado del sistema. Este control se ejerce ejecutando SimrigRemoteControl.exe con argumentos de línea de comandos específicos, e interpretando los códigos de salida y JSON devueltos.
Nota
SimrigRemoteControl.exe es parte del paquete opcional Management Tools. Instale este paquete utilizando el instalador de SIMRIG Control Center.
El procedimiento es el siguiente:
Inicie una instancia de larga duración de SIMRIG Control Center usando el argumento de línea de comandos /EnableRemoteControl. Esta instancia controla el sistema de movimiento, lee la telemetría del juego e interactúa con el usuario. Es conocido como el servidor [1]. Luego, para habilitar el movimiento, ejecute SimrigRemoteControl.exe EnableMotion. Esta instancia de corta duración de SimrigRemoteControl.exe es conocida como el cliente [2]. El cliente emite un comando EnableMotion al servidor. El servidor entonces habilita el movimiento y responde con éxito o fallo. El proceso del cliente entonces termina y reporta el resultado usando un código de salida y JSON sobre la salida estándar.
Dicho de otra manera, el usuario iniciaría SIMRIG Control Center con el control remoto habilitado. El script luego inicia SimrigRemoteControl.exe una y otra vez cada vez que desea emitir un comando.
Se devuelven los siguientes códigos de salida:
Código de salida |
Descripción |
|---|---|
0 |
Éxito |
1 |
Error genérico del servidor. Consulte la salida estándar para más detalles. |
2 |
Error genérico del cliente. Consulte la salida estándar para más detalles. |
3 |
Comando desconocido. El cliente no reconoce el comando dado. |
4 |
Argumentos malformados o inexistentes. El comando espera más o diferente información de los argumentos de la línea de comandos. |
5 |
Tiempo de espera. No hay un servidor en ejecución. |
Los siguientes comandos están disponibles:
Comando |
Descripción |
|---|---|
EnableMotion |
Habilita el sistema de movimiento. El movimiento comienza cuando la telemetría está disponible. |
DisableMotion |
Deshabilita el sistema de movimiento. El sistema de movimiento regresa a su posición neutral y luego se desactiva la alimentación de los motores. |
ResetAllDevices |
Reinicia todos los dispositivos conectados |
SystemStatus |
Devuelve el estado del sistema y del dispositivo |
Los resultados detallados se devuelven como objetos JSON en la salida estándar.
Los mensajes de error tienen el siguiente formato:
{
"type": "error",
"error": "Una descripción del error va aquí.",
"other_fields": "también pueden existir"
}
Los mensajes de éxito tienen el siguiente formato:
{
"type": "success",
"other_fields": "también pueden existir"
}
EnableMotion
Habilita el sistema de movimiento. Esto tiene el mismo efecto que presionar el botón Habilitar en la interfaz principal. El movimiento comienza cuando la telemetría está disponible. El sistema vuelve a su posición de reposo cuando la telemetría se detiene y luego se desactiva la potencia.
- salida:
Se devuelve un mensaje de éxito vacío en caso de éxito:
{"type": "success"}.
DisableMotion
Deshabilita el sistema de movimiento. Esto tiene el mismo efecto que presionar el botón Deshabilitar en la interfaz principal. El sistema vuelve a su posición de reposo y luego se desactiva la potencia.
- salida:
Se devuelve un mensaje de éxito vacío en caso de éxito:
{"type": "success"}.
ResetAllDevices
Advertencia
Los códigos de error solo se establecen cuando ocurre un problema de hardware. No deben tomarse a la ligera. Siempre investigue la causa del código de error antes de restablecer. No cumplir puede resultar en daño permanente.
Reinicia todos los dispositivos conectados. Esto borra todos los códigos de error.
- salida:
Se devuelve un mensaje de éxito vacío en caso de éxito:
{"type": "success"}.
SystemStatus
Obtiene el estado del sistema, como si el movimiento está habilitado o no. Esto incluye información sobre todos los dispositivos conectados.
- salida:
El estado del sistema se devuelve en caso de éxito:
{ "system_status": { "devices": [ { "nominal": false, "error_codes": [18, 18, 18, 18], "estopped": false, "firmware_update_available": false, "device_status": "" } ], "motion_enabled": false, "telemetry_source": 0, "telemetry_status": "" }, "type": "success" }
- system_status
- devices
Esta es una matriz de todos los dispositivos conectados al sistema. Puede ser
nullsi no se encuentran dispositivos.- nominal
Este indicador es
truesi el estado del dispositivo es nominal. Si el indicador esfalsepodría indicar que el dispositivo está desconectado, o que un código de error está establecido.
- error_codes
A menos que sea
null, esta matriz contiene todos los códigos de error establecidos por el dispositivo. Reinicie el dispositivo para borrar los códigos de error. Vea advertencia.
- estopped
Un indicador de conveniencia que es
truecuando el paro de emergencia está activo. Esta es una interpretación de la matriz de códigos de error.
- firmware_update_available
Este indicador es
truesi hay una actualización de firmware disponible para este dispositivo.
- device_status
Una explicación legible por humanos del estado del dispositivo. Puede indicar que el dispositivo está funcionando y todo funciona como se espera. También podría indicar que ha ocurrido un error de hardware, etc.
- motion_enabled
Este indicador es
truecuando el movimiento está habilitado. Use los comandosEnableMotion/DisableMotionpara controlar este indicador.
- telemetry_source
El ID de la fuente de telemetría actual.
- telemetry_status
Una explicación legible por humanos del estado actual de la fuente de telemetría. Puede indicar que el juego está en ejecución y todo funciona como se espera. También podría indicar que no hay un juego en ejecución, etc.
Registro de cambios
- 2023-08-28:
Usa
SimrigRemoteControl.exepara emitir comandos en lugar deSimrigControlCenter.exe
- 2023-08-01:
Renombrado
okde los dispositivos anominalAñade
device_status
Configuración de acceso directo
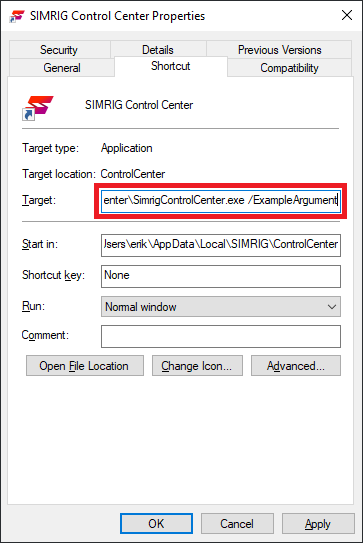
Para iniciar SIMRIG Control Center con uno o más argumentos de línea de comandos, crea un nuevo acceso directo en tu escritorio o menú de inicio. Usa un nombre memorable. Luego haz clic derecho en el acceso directo para abrir sus Propiedades.
Añade tus argumentos de línea de comando al final del cuadro de texto Destino. Guarda los cambios.
SIMRIG Control Center se iniciará con los argumentos de línea de comando añadidos cada vez que se use este acceso directo en el futuro.