Kommandozeilenargumente
SIMRIG Control Center verwendet Kommandozeilenargumente, um sein Verhalten und den Startvorgang zu erweitern. Diese sind eine erweiterte Funktion, die nur für einige wenige nützlich ist.
Die folgenden Kommandozeilenargumente werden erkannt:
Argument |
Beschreibung |
|---|---|
/Version |
Gibt die Programmversion aus und beendet sich |
/SingleCore |
Begrenzt das Programm auf die Nutzung eines einzelnen Prozessorkerns |
/ReloadDrivers |
Lädt beim Start alle Gerätetreiber einmal neu |
/ReloadDriver |
Siehe /ReloadDrivers |
/ForceEnable |
Aktiviert das Bewegungssystem automatisch beim Start |
/TelemetrySource |
Listet alle verfügbaren ID-Quellen der Telemetrie auf |
/TelemetrySource=<id> |
Überschreibt die automatische Auswahl der Telemetriequelle mit der angegebenen Telemetriequellen-ID |
/Minimized |
Startet mit minimiertem Hauptfenster |
/Simple |
Zeigt eine vereinfachte Benutzeroberfläche mit weniger Einstellungen und mehr Automatisierung |
/EnableRemoteControl |
Hört auf und befolgt Fernsteuerungsbefehle |
Die folgenden Kommandozeilenargumente werden für interne Zwecke verwendet. Verlassen Sie sich nicht darauf:
Argument |
Beschreibung |
|---|---|
/AutoStart |
Zeigt an, dass das Programm von Windows beim Systemstart gestartet wurde. Das aktuelle Verzeichnis ist so eingestellt, dass es die ausführbare Datei des SIMRIG Control Center enthält. |
/Restart |
Zeigt an, dass das Programm von sich selbst neu gestartet wurde. Wartet, bis die vorherige Instanz beendet ist, bevor es fortfährt. |
/Updated |
Zeigt an, dass das Programm aktualisiert wurde |
Fernsteuerungskommandos
Fernsteuerungskommandos werden verwendet, um das SIMRIG Control Center zu automatisieren. Sie ermöglichen externen Programmen und Skripten eine begrenzte Steuerung des Systems. Diese Steuerung erfolgt durch das Ausführen von SimrigRemoteControl.exe mit bestimmten Kommandozeilenargumenten sowie durch das Interpretieren der zurückgegebenen Exit-Codes und des JSON.
Hinweis
SimrigRemoteControl.exe ist Teil des optionalen Management Tools-Pakets. Installieren Sie dieses Paket mit dem SIMRIG Control Center Installer.
Der Vorgang ist wie folgt:
Starten Sie eine langfristig laufende Instanz von SIMRIG Control Center mit dem Kommandozeilenargument /EnableRemoteControl. Diese Instanz steuert das Bewegungssystem, liest Telemetrie vom Spiel und interagiert mit dem Benutzer. Sie wird als Server [1] bezeichnet. Um die Bewegung zu aktivieren, führen Sie dann SimrigRemoteControl.exe EnableMotion aus. Diese kurzlebige Instanz von SimrigRemoteControl.exe ist als Client [2] bekannt. Der Client gibt einen EnableMotion-Befehl an den Server aus. Der Server aktiviert dann die Bewegung und antwortet mit entweder Erfolg oder Misserfolg. Der Client-Prozess beendet sich dann und gibt das Ergebnis mit einem Exit-Code und JSON über Standardausgabe zurück.
Anders ausgedrückt, der Benutzer würde das SIMRIG Control Center mit aktivierter Fernsteuerung starten. Das Skript startet dann SimrigRemoteControl.exe immer wieder, um jedes Mal, wenn ein Befehl ausgeführt werden soll, einen Befehl auszugeben.
Die folgenden Exit-Codes werden zurückgegeben:
Exit-Code |
Beschreibung |
|---|---|
0 |
Erfolg |
1 |
Generischer Serverfehler. Siehe Standardausgabe für Details. |
2 |
Generischer Clientfehler. Siehe Standardausgabe für Details. |
3 |
Unbekannter Befehl. Der Client erkennt den angegebenen Befehl nicht. |
4 |
Fehlerhafte oder fehlende Argumente. Der Befehl erwartet mehr oder andere Informationen aus den Kommandozeilenargumenten. |
5 |
Zeitüberschreitung. Kein Server läuft. |
Die folgenden Befehle sind verfügbar:
Befehl |
Beschreibung |
|---|---|
EnableMotion |
Aktiviert das Bewegungssystem. Die Bewegung beginnt, wenn Telemetrie verfügbar wird. |
DisableMotion |
Deaktiviert das Bewegungssystem. Das Bewegungssystem kehrt in seine neutrale Position zurück, und dann wird der Strom an die Motoren deaktiviert. |
ResetAllDevices |
Setzt alle angeschlossenen Geräte zurück |
SystemStatus |
Gibt System- und Gerätestatus zurück |
Detaillierte Ergebnisse werden als JSON-Objekte über die Standardausgabe zurückgegeben.
Fehlermeldungen haben das folgende Format:
{
"type": "error",
"error": "Hier steht eine Beschreibung des Fehlers.",
"other_fields": "können auch existieren"
}
Erfolgsmeldungen haben das folgende Format:
{
"type": "success",
"other_fields": "können auch existieren"
}
EnableMotion
Aktiviert das Bewegungssystem. Dies hat den gleichen Effekt, wie die Aktivieren-Taste in der Hauptoberfläche zu drücken. Die Bewegung beginnt, wenn Telemetrie verfügbar ist. Das System kehrt zu seiner Ruhelage zurück, wenn die Telemetrie stoppt, dann wird der Strom deaktiviert.
- output:
Eine leere Erfolgsmeldung wird bei Erfolg zurückgegeben:
{"type": "success"}.
DisableMotion
Deaktiviert das Bewegungssystem. Dies hat den gleichen Effekt, wie die Deaktivieren-Taste in der Hauptoberfläche zu drücken. Das System kehrt zu seiner Ruhelage zurück, dann wird der Strom deaktiviert.
- output:
Eine leere Erfolgsmeldung wird bei Erfolg zurückgegeben:
{"type": "success"}.
ResetAllDevices
Warnung
Fehlercodes werden nur gesetzt, wenn ein Hardwareproblem auftritt. Sie sollten nicht auf die leichte Schulter genommen werden. Untersuchen Sie immer die Ursache des Fehlercodes vor dem Zurücksetzen. Die Nichteinhaltung kann zu dauerhaften Schäden führen.
Setzt alle angeschlossenen Geräte zurück. Dies löscht alle Fehlercodes.
- output:
Eine leere Erfolgsmeldung wird bei Erfolg zurückgegeben:
{"type": "success"}.
SystemStatus
Erhalten Sie den Systemstatus; z. B. ob die Bewegung aktiviert ist oder nicht. Dies umfasst Informationen über alle angeschlossenen Geräte.
- output:
Der Systemstatus wird bei Erfolg zurückgegeben:
{ "system_status": { "devices": [ { "nominal": false, "error_codes": [18, 18, 18, 18], "estopped": false, "firmware_update_available": false, "device_status": "" } ], "motion_enabled": false, "telemetry_source": 0, "telemetry_status": "" }, "type": "success" }
- system_status
- devices
Dies ist ein Array aller Geräte, die an das System angeschlossen sind. Es kann
nullsein, wenn keine Geräte gefunden werden.- nominal
Diese Flagge ist
true, wenn der Gerätestatus nominel ist. Wenn die Flaggefalseist, kann das darauf hindeuten, dass das Gerät getrennt ist oder dass ein Fehlercode gesetzt ist.
- error_codes
Sofern nicht
null, enthält dieses Array alle vom Gerät gesetzten Fehlercodes. Setzen Sie das Gerät zurück, um die Fehlercodes zu löschen. Siehe Warnung.
- estopped
Ein Komfort-Flag, das
trueist, wenn der Not-Aus aktiv ist. Dies ist eine Interpretation des Fehlercode-Arrays.
- firmware_update_available
Diese Flagge ist
true, wenn ein Firmware-Update für dieses Gerät verfügbar ist.
- device_status
Eine für Menschen lesbare Erklärung des Gerätestatus. Sie kann darauf hinweisen, dass das Gerät läuft und alles wie erwartet funktioniert. Sie kann auch auf einen Hardwarefehler hinweisen usw.
- motion_enabled
Diese Flagge ist
true, wenn die Bewegung aktiviert ist. Verwenden Sie dieEnableMotion/DisableMotion-Befehle, um diese Flagge zu steuern.
- telemetry_source
Die ID der aktuellen Telemetriequelle.
- telemetry_status
Eine für Menschen lesbare Erklärung des aktuellen Status der Telemetriequelle. Sie kann darauf hinweisen, dass das Spiel läuft und alles wie erwartet funktioniert. Sie kann auch darauf hinweisen, dass kein Spiel läuft usw.
Changelog
- 2023-08-28:
Verwende
SimrigRemoteControl.exe, um Befehle zu erteilen, anstattSimrigControlCenter.exe
- 2023-08-01:
Umbenennung von
okder Geräte zunominalHinzufügung von
device_status
Verknüpfungseinrichtung
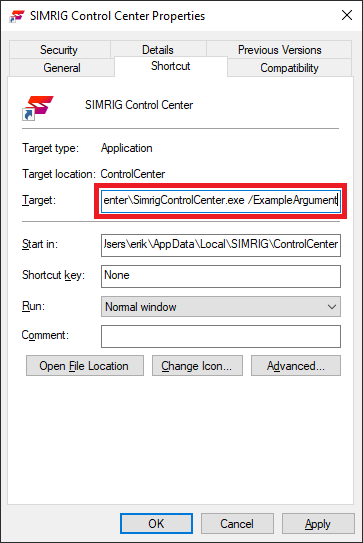
Um SIMRIG Control Center mit einem oder mehreren Kommandozeilenargumenten zu starten, erstellen Sie eine neue Verknüpfung auf Ihrem Desktop oder im Startmenü. Verwenden Sie einen einprägsamen Namen. Klicken Sie dann mit der rechten Maustaste auf die Verknüpfung, um deren Eigenschaften zu öffnen.
Fügen Sie Ihre Kommandozeilenargumente am Ende des Textfelds Ziel hinzu. Speichern Sie die Änderungen.
SIMRIG Control Center startet mit den hinzugefügten Kommandozeilenargumenten jedes Mal, wenn diese Verknüpfung zukünftig genutzt wird.