Opdrachtregelargumenten
SIMRIG Control Center gebruikt opdrachtregelargumenten om het gedrag en de opstartprocedure uit te breiden. Dit is een geavanceerde functie die slechts voor enkelen nuttig is.
De volgende opdrachtregelargumenten worden herkend:
Argument |
Beschrijving |
|---|---|
/Version |
Toont de programmaversie en stopt daarna |
/SingleCore |
Beperkt het programma tot het gebruik van één processorkern |
/ReloadDrivers |
Laadt alle apparaatstuurprogramma’s eenmalig opnieuw bij het opstarten |
/ReloadDriver |
Zie /ReloadDrivers |
/ForceEnable |
Schakelt motion automatisch in bij het opstarten |
/TelemetrySource |
Toont alle beschikbare telemetry source-ID’s |
/TelemetrySource=<id> |
Overschrijft de automatische selectie van de telemetry source met de opgegeven telemetry source-ID |
/Minimized |
Start met het hoofdvenster geminimaliseerd |
/Simple |
Toont een vereenvoudigde UI met minder instellingen en meer automatisering |
/EnableRemoteControl |
Luistert naar en voert remote control commands uit |
De volgende opdrachtregelargumenten zijn bedoeld voor intern gebruik. Vertrouw hier niet op:
Argument |
Beschrijving |
|---|---|
/AutoStart |
Geeft aan dat het programma door Windows is gestart bij het opstarten van het systeem. De huidige map is ingesteld zodat deze het SIMRIG Control Center-uitvoerbare bestand bevat. |
/Restart |
Geeft aan dat het programma door zichzelf opnieuw is gestart. Wacht tot de vorige instantie is afgesloten voordat wordt doorgegaan. |
/Updated |
Geeft aan dat het programma is bijgewerkt |
Remote control-commando’s
Remote control-commando’s worden gebruikt om SIMRIG Control Center te automatiseren. Ze geven externe programma’s en scripts beperkte controle over het systeem. Deze controle wordt uitgevoerd door SimrigRemoteControl.exe te starten met specifieke opdrachtregelargumenten, en door de geretourneerde exit-codes en JSON te interpreteren.
Notitie
SimrigRemoteControl.exe maakt deel uit van het optionele pakket Management Tools. Installeer dit pacakge met de SIMRIG Control Center-installer.
De procedure is als volgt:
Start een langdurig draaiende instantie van SIMRIG Control Center met het opdrachtregelargument /EnableRemoteControl. Deze instantie bestuurt het motionsysteem, leest telemetrie uit de game en communiceert met de gebruiker. Dit heet de server [1]. Start vervolgens, om motion in te schakelen, SimrigRemoteControl.exe EnableMotion. Deze kortstondige instantie van SimrigRemoteControl.exe heet de client [2]. De client geeft een EnableMotion-commando aan de server. De server schakelt vervolgens motion in en antwoordt met succes of mislukking. Daarna beëindigt het clientproces en rapporteert het resultaat via een exit-code en JSON op standard output.
Anders gezegd: de gebruiker start SIMRIG Control Center met remote control ingeschakeld. Het script start daarna steeds opnieuw SimrigRemoteControl.exe telkens wanneer het een commando wil geven.
De volgende exit-codes worden geretourneerd:
Exit-code |
Beschrijving |
|---|---|
0 |
Succes |
1 |
Algemene serverfout. Zie standard output voor details. |
2 |
Algemene clientfout. Zie standard output voor details. |
3 |
Onbekend commando. De client herkent het opgegeven commando niet. |
4 |
Onjuist gevormde of ontbrekende argumenten. Het commando verwacht meer of andere informatie uit de opdrachtregelargumenten. |
5 |
Time-out. Er draait geen server. |
De volgende commando’s zijn beschikbaar:
Commando |
Beschrijving |
|---|---|
EnableMotion |
Schakelt het motionsysteem in. Motion start zodra telemetrie beschikbaar is. |
DisableMotion |
Schakelt het motionsysteem uit. Het motionsysteem keert terug naar de neutrale positie en daarna wordt de voeding van de motoren uitgeschakeld. |
ResetAllDevices |
Reset alle aangesloten apparaten |
SystemStatus |
Geeft systeem- en apparaatstatus terug |
Gedetailleerde resultaten worden als JSON-objecten teruggegeven op standard output.
Foutmeldingen hebben het volgende formaat:
{
"type": "error",
"error": "Hier komt een beschrijving van de fout.",
"other_fields": "kan ook bestaan"
}
Succesmeldingen hebben het volgende formaat:
{
"type": "success",
"other_fields": "kan ook bestaan"
}
EnableMotion
Schakelt het motionsysteem in. Dit heeft hetzelfde effect als het indrukken van de knop Enable in de hoofd-UI. Motion start zodra telemetrie beschikbaar is. Het systeem keert terug naar de rustpositie wanneer telemetrie stopt en daarna wordt de voeding uitgeschakeld.
- output:
Een leeg succesbericht wordt bij succes geretourneerd:
{"type": "success"}.
DisableMotion
Schakelt het motionsysteem uit. Dit heeft hetzelfde effect als het indrukken van de knop Disable in de hoofd-UI. Het systeem keert terug naar de rustpositie en daarna wordt de voeding uitgeschakeld.
- output:
Een leeg succesbericht wordt bij succes geretourneerd:
{"type": "success"}.
ResetAllDevices
Waarschuwing
Foutcodes worden alleen ingesteld wanneer er een hardwareprobleem optreedt. Neem deze niet licht op. Onderzoek altijd de oorzaak van de foutcode voordat je reset. Als je dit niet doet, kan dit leiden tot permanente schade.
Reset alle aangesloten apparaten. Dit wist alle foutcodes.
- output:
Een leeg succesbericht wordt bij succes geretourneerd:
{"type": "success"}.
SystemStatus
Haal de systeemstatus op; zoals of motion al dan niet is ingeschakeld. Dit omvat informatie over alle aangesloten apparaten.
- output:
De systeemstatus wordt bij succes geretourneerd:
{ "system_status": { "devices": [ { "nominal": false, "error_codes": [18, 18, 18, 18], "estopped": false, "firmware_update_available": false, "device_status": "" } ], "motion_enabled": false, "telemetry_source": 0, "telemetry_status": "" }, "type": "success" }
- system_status
- devices
Dit is een array met alle apparaten die op het systeem zijn aangesloten. Deze kan
nullzijn als er geen apparaten worden gevonden.- nominal
Deze vlag is
trueals de apparaatstatus nominaal is. Als de vlagfalseis, kan dit erop wijzen dat het apparaat is losgekoppeld, of dat er een foutcode is ingesteld.
- error_codes
Tenzij
nullbevat deze array alle foutcodes die door het apparaat zijn ingesteld. Reset het apparaat om de foutcodes te wissen. Zie warning.
- estopped
Een gemaksvlag die
trueis wanneer de noodstop actief is. Dit is een interpretatie van de array met foutcodes.
- firmware_update_available
Deze vlag is
trueals er een firmware-update beschikbaar is voor dit apparaat.
- device_status
Een menselijk leesbare uitleg van de apparaatstatus. Dit kan aangeven dat het apparaat draait en dat alles werkt zoals verwacht. Het kan ook aangeven dat er een hardwarefout is opgetreden, enz.
- motion_enabled
Deze vlag is
truewanneer motion is ingeschakeld. Gebruik de commando’sEnableMotion/DisableMotionom deze vlag te sturen.
- telemetry_source
De ID van de huidige telemetry source.
- telemetry_status
Een menselijk leesbare uitleg van de huidige status van de telemetry source. Dit kan aangeven dat de game draait en dat alles werkt zoals verwacht. Het kan ook aangeven dat er geen game draait, enz.
Changelog
- 2023-08-28:
Gebruik
SimrigRemoteControl.exeom commando’s te geven in plaats vanSimrigControlCenter.exe
- 2023-08-01:
Apparaten:
okhernoemd naarnominalVoegt
device_statustoe
Snelkoppeling instellen
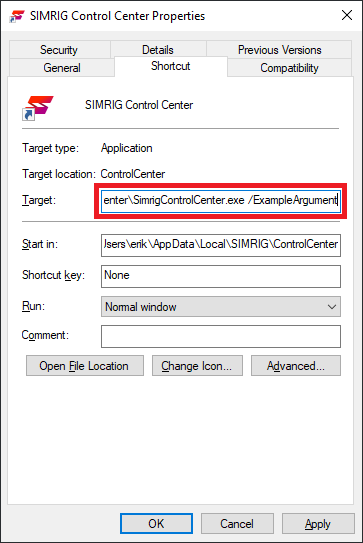
Om SIMRIG Control Center te starten met één of meer opdrachtregelargumenten, maak je een nieuwe snelkoppeling op je bureaublad of in je startmenu. Gebruik een herkenbare naam. Klik vervolgens met de rechtermuisknop op de snelkoppeling om de Eigenschappen te openen.
Voeg je opdrachtregelargumenten toe aan het einde van het tekstvak Doel. Sla de wijzigingen op.
SIMRIG Control Center start met de toegevoegde opdrachtregelargumenten telkens wanneer deze snelkoppeling in de toekomst wordt gebruikt.