Page de Profil
Cette section décrit la page de profil et son fonctionnement.
SIMRIG Control Center est construit autour des Profils. Un profil n’est rien d’autre qu’un ensemble de paramètres qui s’appliquent à une voiture unique dans un jeu unique.
Chaque voiture, dans chaque jeu, se voit attribuer un profil unique. Ce profil est automatiquement sélectionné lorsque le jeu démarre et que la voiture prend la route.
Le profil actif est affiché à l’écran. Voir le rectangle rouge ci-dessous.
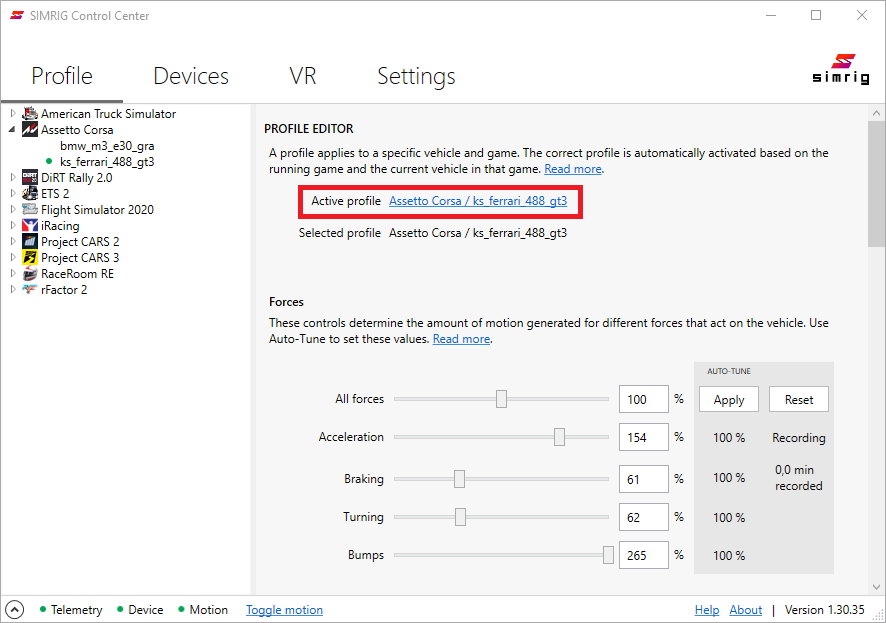
Le profil actuellement actif est affiché à l’écran. IR indique que ce profil est associé à iRacing.
Parfois, vous verrez le message suivant : « Ce profil n’est plus actif ! »

Il s’affiche lorsque vous changez de jeu ou de voiture tout en laissant la page de profil ouverte. Cliquez sur le lien Changer maintenant pour ouvrir le profil actif à la place. Cela affectera le profil affiché à l’écran. Cela n’affectera pas le profil utilisé par le SIMRIG Control Center.
Concepts
Le but d’un profil est de contrôler comment les forces simulées sont converties en mouvement. Puisque chaque voiture se comporte de manière différente (certaines sont rapides, d’autres lentes), chaque voiture nécessite un profil et des paramètres uniques. Obtenir le bon profil et le régler correctement est très important car cela détermine le comportement et la réactivité du système de mouvement face aux événements dans le jeu.
L’événement en jeu le plus important est l’accélération du véhicule. La plupart des paramètres du profil traitent donc de l’accélération et de la sensibilité du système à l’accélération dans différentes directions.
Les paramètres de profil sont divisés en trois parties principales : Allocation des Axes, Forces et Orientation.
Forces
Chaque véhicule produit différentes quantités de forces en accélérant, tournant et freinant. Ces paramètres sont responsables de la conversion de ces forces en une plage normalisée.
Prenons le paramètre Accélération à titre d’exemple. Pendant que le véhicule accélère, il génère des forces G. La voiture de cet exemple est capable de générer 1 G d’accélération avant. En réglant Toutes les forces à 100 % et Accélération à 100 %, le système de mouvement utilisera tout le tangage alloué tandis que la voiture accélère à 1 G. À 0,5 G, il utilise la moitié du tangage alloué.
Examinons les paramètres disponibles :
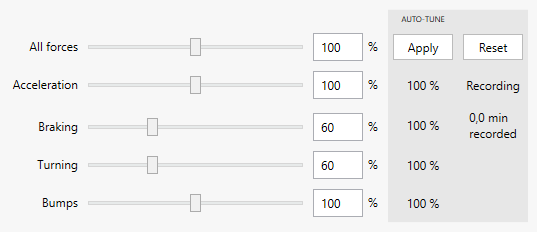
- Toutes les forces:
Ce curseur contrôle la sensibilité générale du système à l’accélération dans toutes les directions. Régler cette valeur à zéro fera rester le système immobile. Il est recommandé de laisser ce réglage à 100 %, mais vous pouvez réduire la valeur si le système semble trop rapide ou nerveux.
- Accélération:
Ce curseur contrôle la sensibilité du système à l’accélération dans la direction avant : forces qui font avancer le véhicule. Ajustez cette valeur jusqu’à ce que le système s’incline vers l’arrière à la quantité désirée lors d’une accélération maximale (généralement à pleine accélération depuis l’arrêt).
- Freinage:
Ce curseur contrôle la sensibilité du système à l’accélération dans la direction arrière : forces qui arrêtent ou reculent le véhicule. Ajustez cette valeur jusqu’à ce que le système s’incline vers l’avant à la quantité désirée lors d’un freinage maximal.
- Virage:
Ce curseur contrôle la sensibilité du système à l’accélération dans la direction gauche ou droite : forces qui font tourner ou rouler le véhicule. Ajustez cette valeur jusqu’à ce que le système s’incline à gauche ou à droite à la quantité désirée lors d’un virage.
- Bosse:
Ce curseur contrôle la sensibilité du système à l’accélération dans la direction verticale : forces qui déplacent le véhicule vers le haut ou vers le bas. Ajustez cette valeur jusqu’à ce que le système se déplace vers le haut et vers le bas à la quantité désirée en roulant sur les trottoirs et autres surfaces irrégulières telles que les nids-de-poule et les graviers.
Astuce
Utilisez Auto Tune pour déterminer les valeurs initiales.
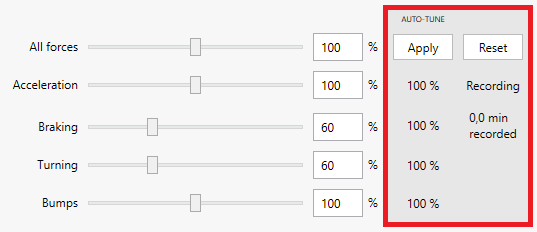
Auto-tune
Auto Tune est conçu pour générer un profil de base en enregistrant les données de télémétrie pendant que vous conduisez. L’algorithme peut générer un profil en analysant les forces agissant sur la voiture. Le profil résultant tente de maximiser la plage de mouvement tout en minimisant le clipping.
Chaque voiture est unique, tout comme chaque conducteur. Vous devrez trouver des paramètres qui fonctionnent pour vous. Cela peut être un processus délicat, mais avec Auto Tune vous aurez au moins un bon point de départ pour un réglage ultérieur.
Paramètres d’intensité
Jusqu’à présent, nous avons examiné les paramètres qui affectent la plage de mouvement. Les paramètres d’intensité affectent toutefois sa vitesse et son accélération. La vitesse et l’accélération sont cruciales pour l’intensité perçue.
Les paramètres d’intensité affectent la vitesse, l’accélération et le déplacement des actionneurs linéaires. Il existe trois préréglages parmi lesquels choisir : Normal, Haut et Brut, avec des niveaux d’intensité croissants. La quatrième option, Personnalisé, permet un contrôle précis de chaque paramètre.
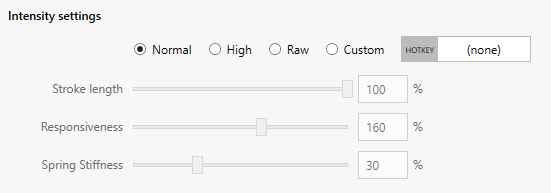
- Longueur de la course:
Définit le déplacement maximal de l’actionneur. Une valeur de 100 % permet à l’actionneur de se déplacer sur 70 mm. Tandis qu’une valeur de 50 % permet un déplacement de 35 mm. Les voitures rapides et rigides bénéficient d’une longueur de course inférieure.
- Réactivité:
Définit la puissance de l’actionneur. Une valeur inférieure se traduit par une accélération inférieure tandis qu’une valeur supérieure signifie plus de puissance et une accélération plus élevée. Essayez une valeur inférieure si vous pensez que le système de mouvement est trop rapide ou trop agressif.
- Ressort de raideur:
Définit la conformité de l’actionneur aux changements de direction. Essayez une valeur inférieure pour supprimer le bruit et les bosses à haute fréquence.
Astuce
Utilisez le Raccourci pour passer entre les préréglages sans quitter le jeu.
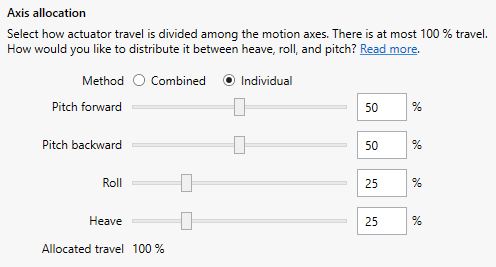
Allocation des axes
Chaque actionneur linéaire a une longueur de déplacement fixe. Cela est déterminé par la construction mécanique de l’actionneur. La façon dont nous choisissons d’utiliser ce déplacement est déterminée par les paramètres d’Allocation des Axes.
Un montant fixe de déplacement est alloué pour chaque axe de mouvement (tangage, roulis, cabrage). Par exemple, nous pouvons allouer 20 mm de déplacement pour le tangage, 30 mm pour le roulis, et 20 mm pour le cabrage. Les Paramètres d’Allocation déterminent ces montants.
Il est intéressant de noter que nous pourrions allouer 70 mm de déplacement à la fois au tangage et au roulis en même temps pour un total de 140 mm de déplacement combiné. Mais ! Se déplacer de 140 mm est physiquement impossible. Cependant, le véhicule freinera rarement à pleine puissance tout en tournant à pleine vitesse. Si cela se produit, l’actionneur atteindra sa limite, ce qui provoquera un clipping du mouvement. Vous pouvez choisir plus de mouvement au risque de clipping ; ou moins de mouvement sans clipping. C’est un compromis qui varie pour chaque véhicule.
Suivre la géométrie du circuit
L’orientation du véhicule est également une source importante de données de mouvement. Peut-être souhaitez-vous que le système de mouvement suive la route ; pour cabrer vers l’arrière en montant une pente ou pour rouler plus agressivement en frappant une bordure. Il y a deux paramètres qui contrôlent comment l’orientation du véhicule affecte le système de mouvement :
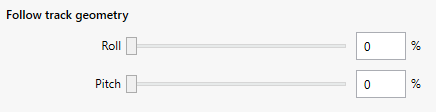
- Roll:
Ce curseur contrôle combien du roulis du véhicule est transféré au système de mouvement. Environ 20 %, il y a un mapping un-à-un entre le véhicule virtuel et le système de mouvement physique (selon la distance entre les actionneurs avant et arrière).
- Pitch:
Ce curseur contrôle combien du tangage du véhicule est transféré au système de mouvement. Environ 20 %, il y a un mapping un-à-un entre le véhicule virtuel et le système de mouvement physique (selon la distance entre les actionneurs avant et arrière).
Changements de vitesse
Les boîtes de vitesses séquentielles et semi-automatiques introduisent un mouvement de tangage soudain et perceptible. Ce mouvement peut être inconfortable ou indésirable. Utilisez ces paramètres pour lisser le mouvement ou le supprimer entièrement.
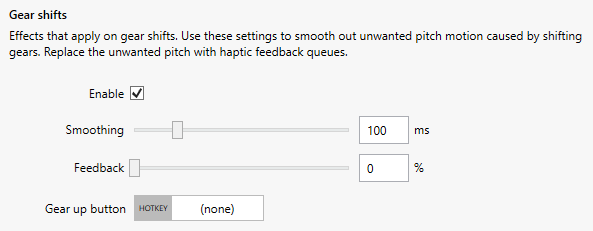
- Activer:
Lorsque activé, l’algorithme détectera et supprimera les changements soudains de tangage causés par les changements de vitesse.
- Lissage:
Certaines boîtes de vitesses sont plus rapides et d’autres plus lentes. La durée devrait couvrir le temps nécessaire à la boîte de vitesses pour changer de vitesse. Augmentez ce curseur jusqu’à ce que le mouvement de tangage soit à votre convenance (laissez le curseur Retour à 0 % pendant le réglage).
- Retour:
Augmentez pour introduire un retour haptique lors du changement de vitesse.
Post-traitement
Parfois, il est nécessaire d’appliquer des techniques de post-traitement aux données de télémétrie; comme le lissage et les limiteurs de vitesse.
- Pitch washout:
Lorsqu’il est activé, le pitch washout ramène le système à un tangage naturel lors d’une accélération constante. Cela rend le système de mouvement à niveau avec votre sol pendant une accélération prolongée. De plus, la vitesse de tangage est limitée pour un trajet plus fluide. Le freinage n’est pas affecté.
- Stabilisation des virages:
Lorsqu’elle est activée, la stabilisation des virages ajoute une zone morte sur l’axe de roulis. Cela rend le système de mouvement moins sujet à rouler lorsqu’il roule droit. Vous ressentirez toujours un mouvement de roulis lors des virages. Augmenter cette valeur agrandit la zone morte et rend le système de mouvement plus stable.
- Lissage:
Ces curseurs contrôlent la vitesse à laquelle le système réagit aux changements. Régler cette valeur à 0 % désactivera le Filtre Passe-bas faisant que le système est aussi rapide et réactif que possible. L’augmentation de cette valeur réduira (et même supprimera) les mouvements rapides et nerveux. Une valeur élevée entraînera une conduite douce.
Astuce
Certains jeux fonctionnent mieux avec le Filtre Passe-bas activé. Si le mouvement est nerveux ou saccadé, essayez de régler le Filtre Passe-bas à 100 % et réduisez progressivement jusqu’à obtenir une conduite fluide et réactive.
Importation et exportation
Vous pouvez exporter des profils individuels vers un fichier. Le fichier peut être partagé et importé plus tard. Les profils exportés ont l’extension de fichier .scc-profile.
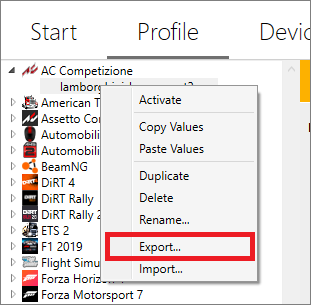
Pour importer un profil, faites un clic droit n’importe où dans l’arbre des profils et choisissez Importer…. Alternativement, déposez le fichier sur l’arbre des profils.
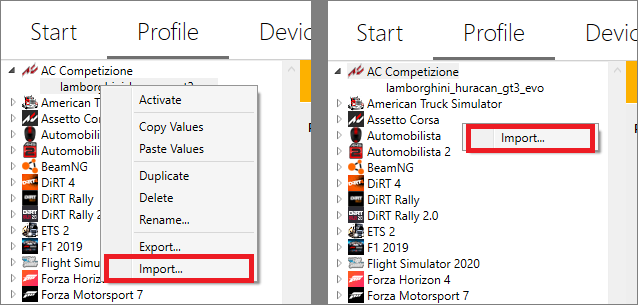
Pour exporter un profil, faites un clic droit sur le profil à exporter et choisissez Exporter..
Comment faire : Auto-tune
Avant de commencer le processus d’Auto Tune, vous devez être dans votre jeu et voiture préférés. Assurez-vous que la télémétrie est connectée et que le système de mouvement est activé.
Conduisez environ 5 minutes
Le but est de générer des données diversifiées
Ne vous écrasez pas (continuez à conduire pendant 30 secondes supplémentaires si vous le faites)
Freinez, accélérez et tournez excessivement
Arrêtez-vous et repartez plusieurs fois si le circuit manque de virages lents
Notez les valeurs suggérées pour l’Accélération, le Freinage, le Virage et les Bosses
Elles ne devraient plus afficher la valeur par défaut de 100 %
Elles devraient être inférieures à 200 %, sinon vous devez conduire davantage
Appuyez sur le bouton Appliquer
Essayez les nouveaux paramètres, ils entreront en vigueur immédiatement après avoir appuyé sur Appliquer
Vous pouvez soit utiliser les valeurs telles quelles, les modifier manuellement ou continuer à enregistrer plus de données
Appuyez sur Appliquer pour utiliser les dernières valeurs
Appuyez sur Réinitialiser pour recommencer depuis le début